Powering the
Future of Humanoids
We are the official data infrastructure partner for the world's leading humanoid robotics companies.
Walker S Series
Industrial-grade dexterity powered by SignIQ Lab's manipulation dataset. Deployed in major EV manufacturing lines.

Tiangong (天工)
The world's first full-sized electric running humanoid. Training on SignIQ Lab's embodied intelligence platform.
Unmatched Data Coverage
We don't just collect data—we set the industry standard for comprehensive, high-quality robotic datasets
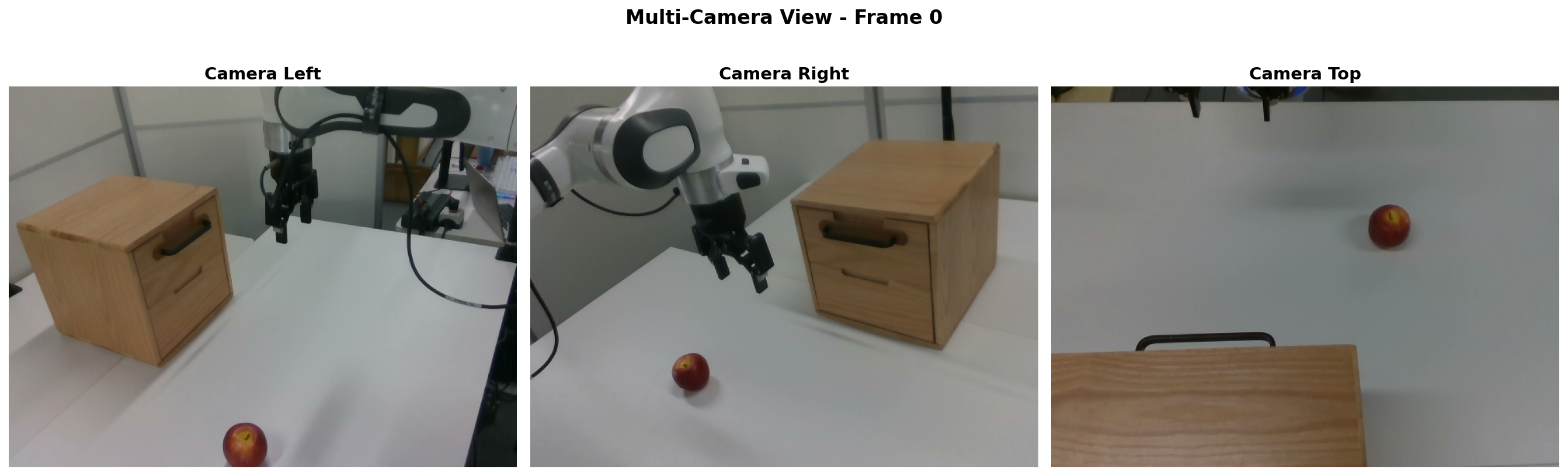
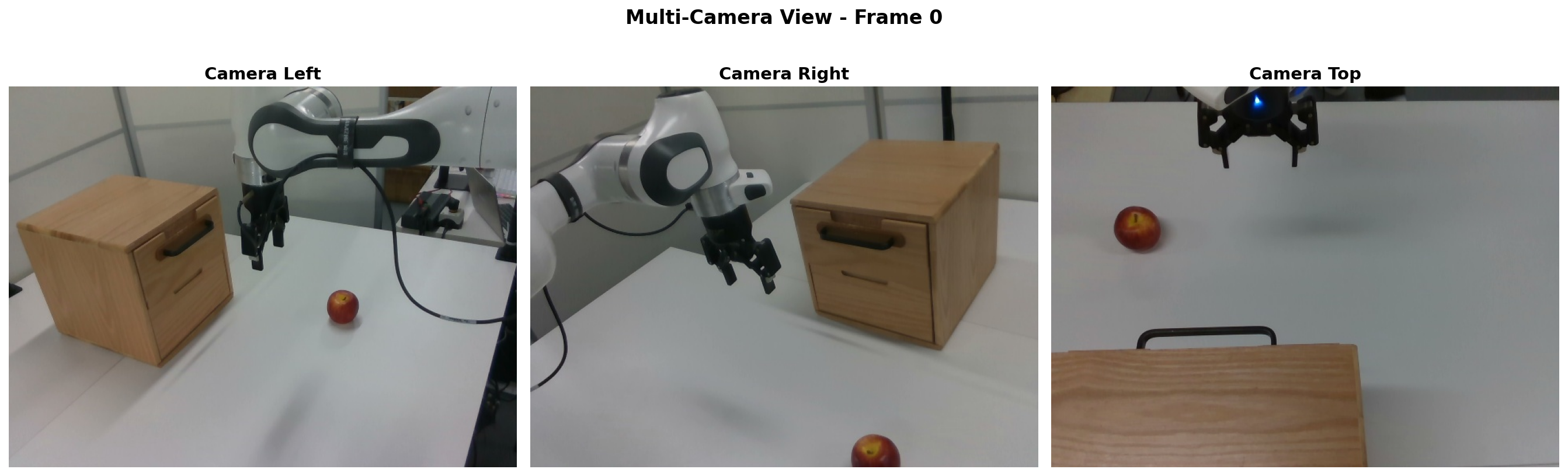
See The Quality For Yourself
Interactive preview of our multi-modal robotic manipulation data
This is just one episode of thousands in our collection
Why Our Data Sets The Standard
| Feature | Industry Average | Open-Source | Us ✓ |
|---|---|---|---|
| Camera Views | 1-2 | 1 | 3-6 |
| Annotation Quality | Crowdsourced | None | Expert PhD-level |
| Capture Rate | 10Hz | Variable | 20Hz Precision |
| Multi-Modal Sensors | RGB only | RGB | RGB+Depth+Force |
| Failure Cases | ✗ | ✗ | ✓ Included |
| Commercial License | ✗ | ✗ | ✓ Available |
| Quality Guarantee | ✗ | ✗ | ✓ Money-back |
Research-Grade Quality
Every dataset goes through our rigorous multi-stage quality control pipeline
Data Capture
High-precision sensors with calibrated multi-camera sync
Expert Annotation
PhD-level robotics experts, not crowdsourced workers
Quality Validation
Automated metrics + manual review for each episode
Delivery
Optimized HDF5 format with complete documentation
Our Leadership
Founded by industry veterans from Meta and leading tech innovators.

Jack Jiang
Co-Founder
Builder with 10+ years of experience at the intersection of media processing and AI.

Sophia Dong
Co-Founder
Serial entrepreneur and product leader. Expert in scaling AI-driven platforms and commercial strategy.